|
 |
 |
The Horus Project is a "Do It Yourself" drone project. The drone is used for surveying purposes. An airplane radio controlled model, is automated to fly a route defined by GPS waypoints. On each waypoint of the route, a high resolution picture is taken from the on board digital camera.
The Geographical Information System SavGIS is used for the postprocessing, allowing the orthorectification of the pictures so that they can be placed on a topographical map.
The take off and landing of the drone is done in manually controlled flight. The surveying part of the flight is fully automatic, including the triggering of the camera.

The UAV itself is a modified MovieStar beginner model from Multiplex:

View of the payload compartment.

In flight: see the camera hole on the bottom of the fuselage.

Back from mission in manually controlled flight.

Aerial pictures taken in France during a test flight in April 2006 are integrated in the topographical Map using a http://en.wikipedia.org/wiki/GIS
First a raw pic, taken with a cheap 3Mpixel digicam:

and the picture set ortho-rectified and placed over the topographic map of the region. The GIS used here is Savane:
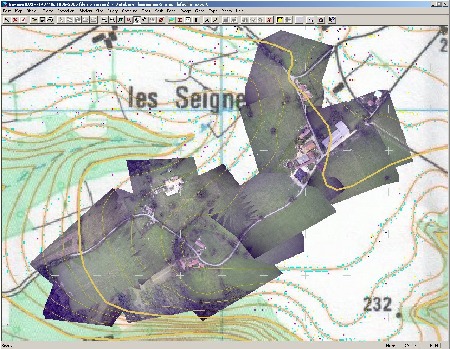
Download high resolution version (1280x993).
The typical ground station view showing telemetry feedback during an automatic flight. The MovieStar is currently flying 858m over sea level:
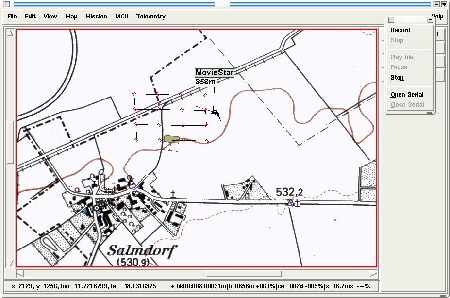
Download high resolution version (927x614)
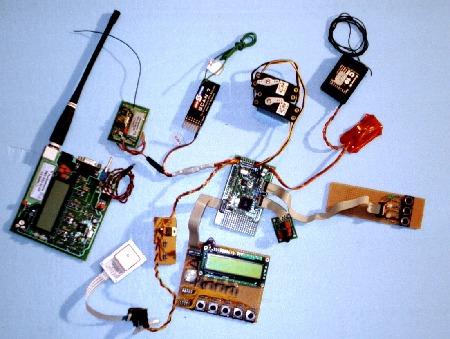
The complete electronic of the system. From left to right:
- Telemetry receiver and sender, Scan7 Scanner Servos, RC Receiver, RC Signal amplifier, GPS with patch antenna, level converter, micro-controller navigation system, altimeter sensor, debugging display: